En el ámbito de la técnica de automatización existe un método de diseño, más o menos informal, al que suele referirse con la sentencia lo que lo pone en marcha , lo que lo para.
un relé por función
Metodología
Se definen los sensores y actuadores necesarios
Aplicando el mantra lo que lo pone en marcha , lo que lo para, se obtienen las condiciones lógicas para la puesta en marcha/paro de cada una de las posibles acciones a realizar por cada actuador
Utilizando un biestable set/reset, relé con circuito de realimentación, se materializan las condiciones lógicas en un circuito eléctrico que nos determinará las condiciones básicas que los sensores habrán de satisfacer
indexador
M1 = M1 B1――― + S1
Ejemplo de aplicación
Vamos a realizar el ejemplo más sencillo posible ...
Disponemos de un motor eléctrico en el que se ha colocado un sensor que facilita una señal cuando el motor ha girado 90° y es necesario que el motor gire 90° a petición de una señal externa.
Apliquemos la metodología definida previamente,
B1 | S1 | M1 | |||
|---|---|---|---|---|---|
| Sensores | Giro de 90° | Petición de marcha | |||
| Actuadores | Motor |
lo que pone el motor en marcha ... una petición de marcha, S1 = 1
lo que para el motor ... que se active el sensor, B1 = 1
Plasmamos todo lo anterior en el siguiente circuito eléctrico, en este caso utilizando un biestable prioritario a la puesta a uno.
🪛 |
M1 B1 M1 |
|---|
Para obtener el funcionamiento deseado es necesario que las señales de los sensores tengan una duración máxima/mínima por determinar.
M1 = M1 B1―――
Limitaciones
Otro diseñador, puede llegar a las siguientes funciones de diseño, correctas desde un punto de vista de la lógica del problema,
- lo que pone el motor en marcha ... una petición de marcha y que el motor este parado en una posición múltiplo de 90°, { S1 = 1, B1 = 1 }
- lo que para el motor ... que se active el sensor, B1 = 1
Su correspondiente circuito eléctrico, usando un biestable prioritario a la puesta a cero
🪛 |
S1 B1 B1 M1 |
|---|
Vaya, algo ha ido realmente mal ...
Al basar nuestro diseño en un biestable, hemos asumido que estamos interesados en los cambios de valor en las variables, no en su propio valor. |
|---|
Hemos transformado la variable B1 en una variable permanente.
La solución a este tipo de inconvenientes pasa por limitar la duración de la señal que la variable facilita, utilizando temporizadores, contactos auxiliares, evaluando flancos, cambiando la prioridad del biestable ...
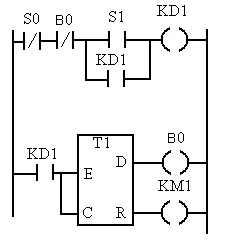
Vamos a utilizar evaluación de flanco para solucionar este pequeño inconveniente, abandonamos la lógica de contactos y utilizaremos un diagrama en escalera, ladder diagram, apto para un autómata programable,
- lo que pone el motor en marcha ... una petición de marcha y que el motor este parado en una posición múltiplo de 90°, { S1 = 1, B1 = 1 }
- lo que para el motor ... que se produzca un flanco ascendente en el sensor
R_TRIG
🪜 |
|
|---|
Este método de diseño asigna un relé a cada función a realizar, mediante la evaluación de las acciones que los actuadores deben realizar.
Al utlizar biestables, los sensores deben satisfacer algunas restricciones temporales a determinar en cada caso.
Es fácil de entender y no requiere de gran aparato matématico, aunque depende en gran medida de la experiencia del diseñador en problemas similares al que se pretende resolver ∎
 José Luis Gálvez, CC BY-SA 3.0, via Wikimedia Commons
José Luis Gálvez, CC BY-SA 3.0, via Wikimedia Commons